
Binnen het Aquabots programma zijn het afgelopen halfjaar grote stappen gezet. Er is door stagiairs, afstudeerders en projectgroepen aan een veelvoud aan onderdelen gewerkt.
Voor het eerst is er door studenten gewerkt binnen, en aan het SDI concept. SDI (Standardised Distributed Intelligence) is een architectuur voor IT-systemen, waarbij deelsystemen die niet gemaakt zijn om in een systeem samen te werken, toch met elkaar kunnen communiceren. Daardoor wordt het eenvoudiger om een systeem te onderhouden en/of om individuele (slimme) componenten te ontwikkelen. Binnen het Aquabots programma wordt deze architectuur toegepast om de ontwikkelde componenten toe te kunnen passen in elk vaartuig, of dit nou een kleine aquabot is of een groter bemand vaartuig.

Afstuderen binnen Aquabots
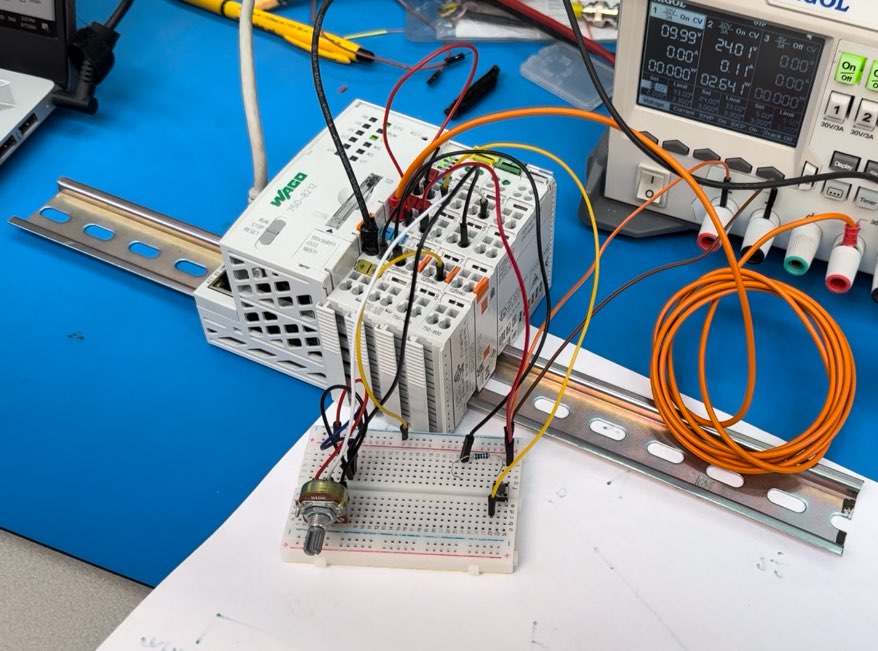
Twee studenten Technische Informatica hebben binnen hun afstudeerproject gewerkt aan het koppelen van bestaande hardware aan de SDI architectuur. Een student heeft dit gedaan op hardware niveau door met behulp van een bestaande PLC de roerhoek van een schip uit te lezen en deze informatie aan het hoofdsysteem te leveren. De andere student heeft dit gedaan op systeemniveau, waarbij informatie van bestaande systemen op schepen binnen gebracht is en geconverteerd naar de SDI standaard. Beide studenten hebben dit geïmplementeerd op een manier die ook werkt op bestaande schepen. Er is getest op zowel de Aquabots als op het opleidingsschip Ab Initio.
Een student Automotive is afgestudeerd op een andere tak van het Aquabots programma. Er is door projectgroepen al een aantal jaar onderzoek gedaan naar het met een onbemand vaartuig inspecteren van duikers met als doel het onderhoud en vervangingsproces van deze civiele constructies effectiever te kunnen gaan uitvoeren. Deze afstudeerder heeft voor dit vaartuig een scanner ontwikkeld die zowel door lucht als door water de staat van de duikerwand in kaart kan brengen. Deze scanner werkt met het principe van lasertriangulatie, waarbij de projectie van een laserlijn op de muur door een camera wordt vast gelegd. Op basis van deze informatie wordt een 3D model van de duiker gemaakt waarop vervormingen en scheuren in de wand te herkennen zijn.
Multidisciplinaire samenwerking
Naast de afstudeerders hebben er ook nog projectgroepen Werktuigbouwkunde en Technische informatica praktisch onderzoek uitgevoerd. De groep werktuigbouwkunde studenten hebben een voortstuwing module gebouwd voor een voormalig sleeptank model van Kotug, een model dat in de toekomst ingezet gaat worden voor proeven met op afstand bestuurde sleepboten. De projectgroep Technische Informatica heeft een cameramodule ontwikkeld zodat bij tests met op afstand bestuurd varen, het camerabeeld van de omgeving van het vaartuig met zo min mogelijk vertraging bij de bestuurder in het controlecentrum in het RDM Aqualab aankomt. Deze cameramodule kan in de toekomst op verschillende vaartuigen worden toegepast.